IRSF1.4m望遠鏡制御系概要
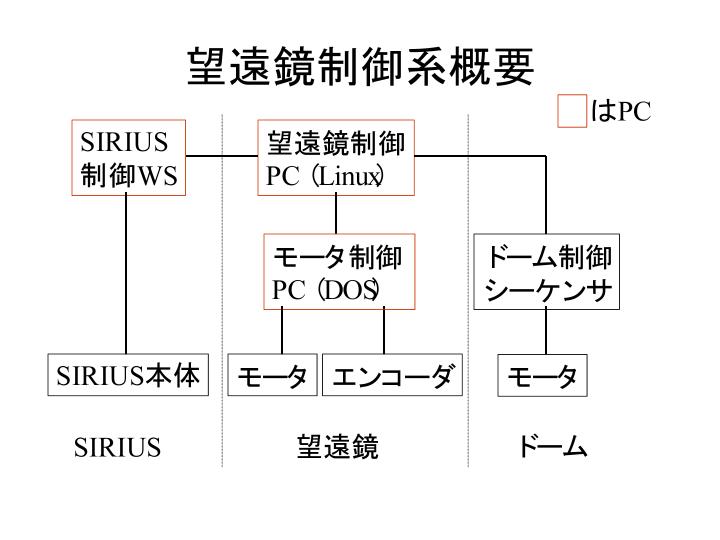
制御系システム図
また、IRSF1.4m望遠鏡は経緯儀式架台を採用しています。
多くの望遠鏡で用いられている赤道儀式架台では、
地球の回転軸と平行な軸(極軸)を地球の自転と同じ速度(等速)で
回転させることで天体を追尾します。
これに対して、経緯儀式架台では方位を指向する方位軸、高さ方向を指向する高度軸、
そして視野が回転するのを防ぐ装置回転軸の3軸を、
常に速度を変化させながら天体を追尾します。
このような制御をおこなうためには、
1. 短時間での天体位置計算の繰り返し
2. 広い速度範囲での精密な望遠鏡駆動制御
が必要です。
私たちは上記の2つの要素の開発に成功し、
高精度な経緯儀式架台の制御を実現しました。